Ph.D student at Huazhong University of Science and Technology. Received undergraduate degree at School of Automation, Huazhong Univesity of Science and Technology in 2017. Devoted to Deep Learning, Reinforcement Learning, Robotics and Control Theory.
dyl@hust.edu.cn.
News
2018-12-9
"Deep Learning Approach to Predict the Grasping Locations for Dual Arm Manipulators" won the best poster reward in CCRS (Annual Conference of Chinese Robotics Society) 2018!
Publication
First Author
Y. Dong, T. Nuchkrua, T. Shen,
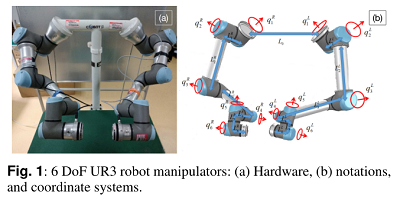
On Asymptotical Stability Contouring Control of Dual-arm Robot with Holonomic Constraints: Modified Distributed Control Framework, IET Control Theory & Applications, 2019.
Link.
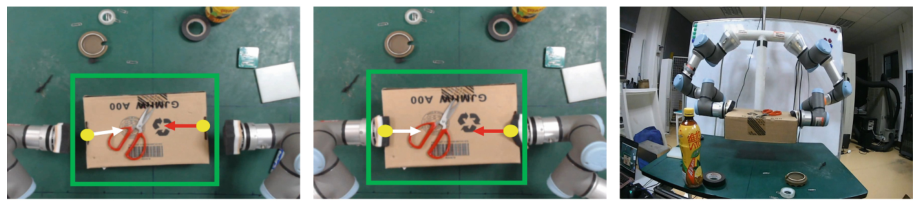
Y. Dong, X. Liu and et al.,
Deep Grasping Prediction with Antipodal Loss for Dual Arm Manipulators, ICIRA 2019.
Link.
Equal Contribution
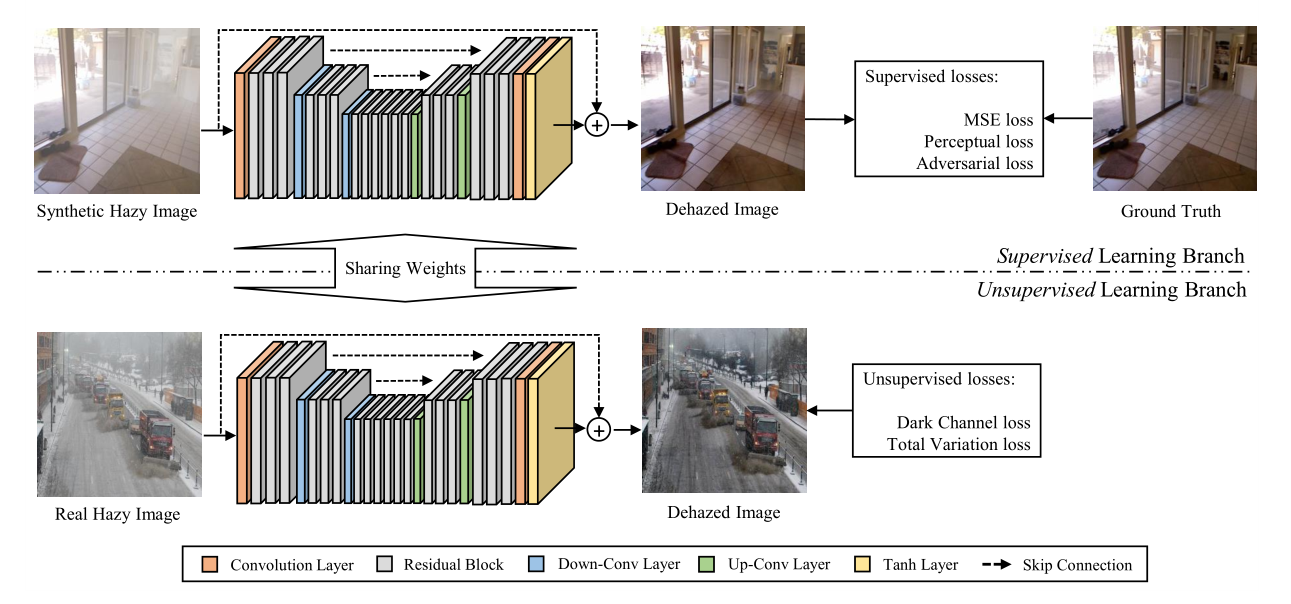
L. Li, Y. Dong and et al.,
Semi-Supervised Image Dehazing, IEEE Transactions on Image Process, accepted, 2019.
Link.
Others
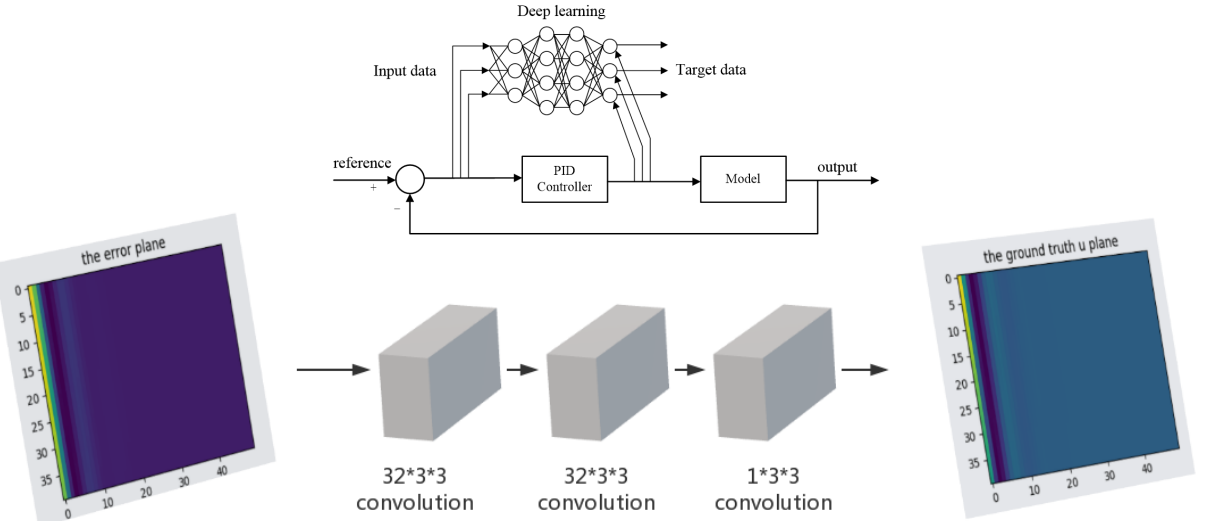
X. Liu, Y. Dong,
A Convolutional Neural Networks Approach to Devise Controller, ICMITE 2017.
Link.